

After initial sketching we went to observe the robot in real life environment and came pretty fast to the conclusion, that the robot attached on top of the navigation platform had to be tilted towards the user. Elderly people with limited movement abilities would have struggled to reach the touch screen in order to use the interactive programs.
We made quick mock-ups of our concept design and presented them to the client. The robots were delivered to us so we could 3D-scan them and take necessary measurements. After the concept design lock Jessica started with the surface modeling, which I then took over in order to make a 3D-printable solid model out of it.
The solid model was split into 5 pieces and fixing points were added. We also created a trunk for small items the robot may need to transport.
After assembly and seam adjustments were done, we took the shell parts to the paint shop and gave them a nice white glossy finish.
The robot will be tested in real life environment at the Kustaankartano sheltered home during autumn 2019.
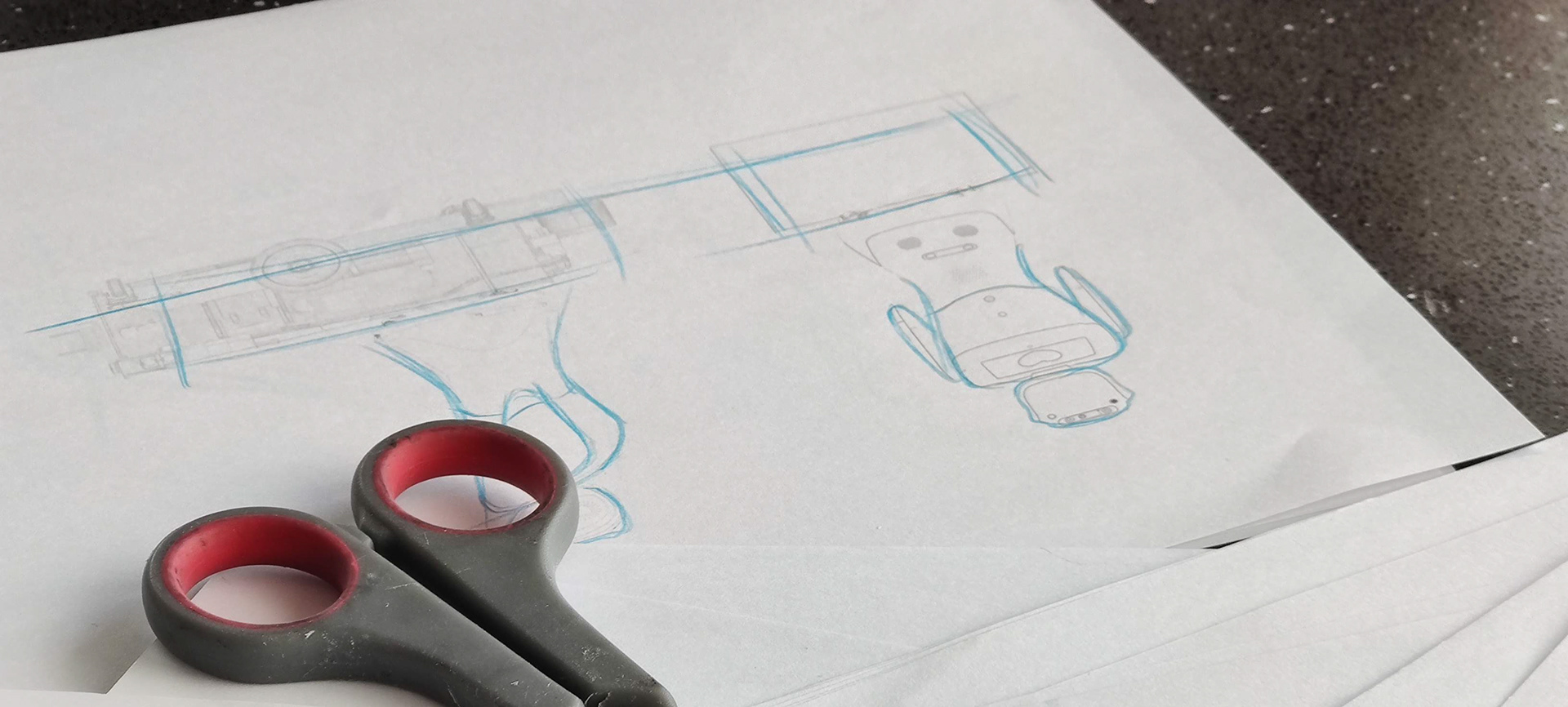
Sketching

Usability research

Preparation for 3D scanning

Mockups

Small scale test print
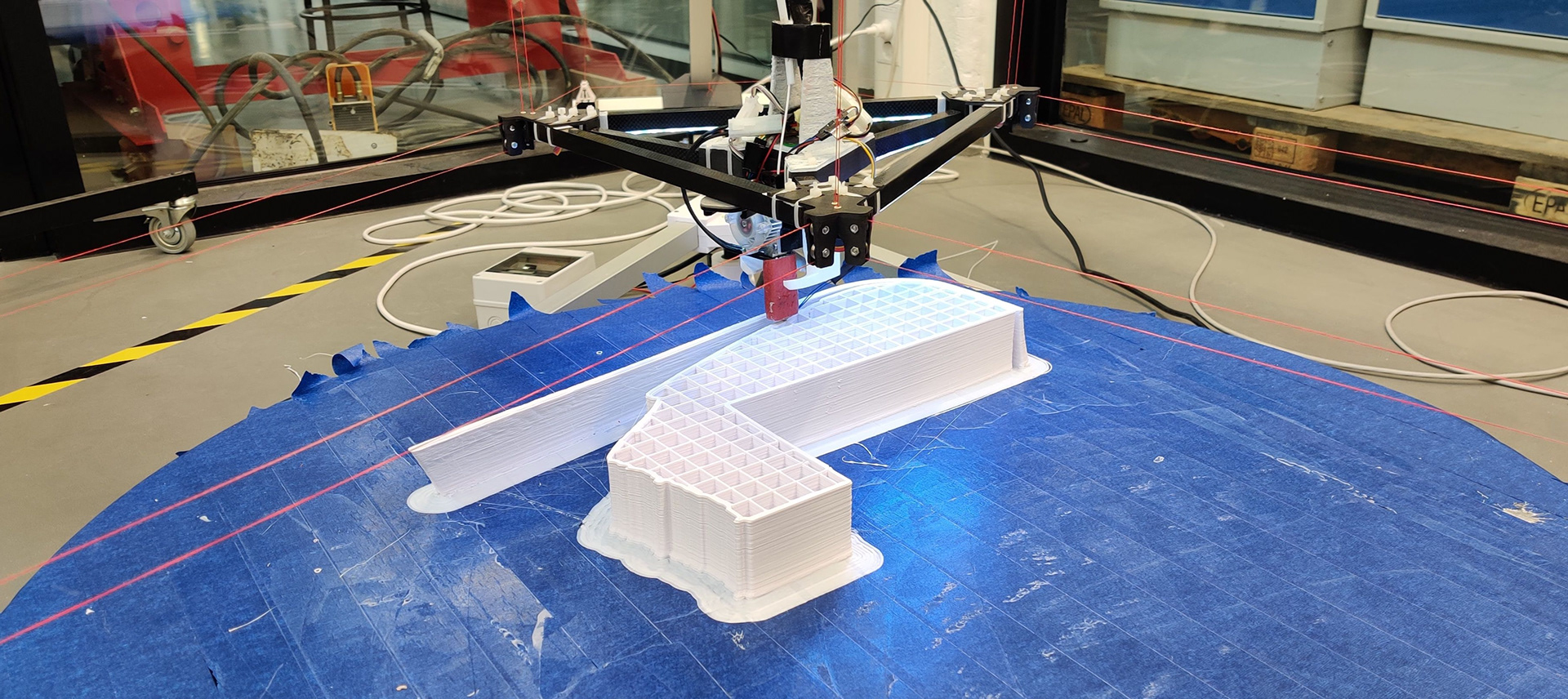
3D printing

Fitting

Assembly

